Have you ever had to implement a solution that had to fullfill multiple tasks at (almost) the same time?
Have you find out that the delay() function ist not a good idea for starting an action or behavior "some time in the future"?
Have you ever had to implement a program that reacts on some kind of events triggered by hardware or timing conditions ?
... so here is a short introduction into the art of writing state machines, a software pattern for solving problems like those above.
In addition to the definition by wikipedia a Finite-state machine (FSM) can be understood as a program
So every program might do this in general, but there is a software pattern that helps structuring your program into this direction and helps with a clear code pattern to make a readable and easy verificable solution for your problem.
A good idea is to start with a diagram that you can sketch on a paper or use a tool like visio.
Here is a diagram for implementing a morse machine:
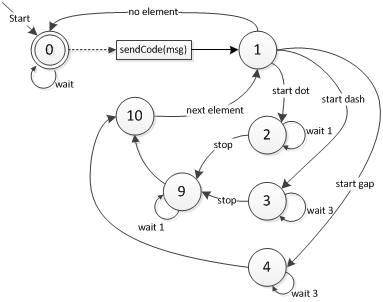
There is a good article on wikipedia about the Morse code where all the characters and the timing is explained.
The implementation here doesn’t include all the codes for the supported letters but accepts “words” in the form of combinations
dots, dashes and spaces like
".- .-. -.. ..- .. -. ---".
In the graph you can see how the machine should work:
All we have to do is to write a litte code for every state we designed above. The pattern we use is:
if (state == [n]) { // let's see what to do if the state is "n"
if ([condition of the first transition is true]) {
[take the action of the first transition]
state = [next state];
} else if ([condition of the 2. transition is true]) {
[take the action of the 2. transition];
state = [next state];
// here add all the possible transitions
} else {
// you should never get here !
} // if
} // if
You can see this pattern all over the implementation within the main FSM function and within the additional event functions.
Before you check the state and the inner conditions it is advantageous to initialize some local variables like:
int buttonLevel = digitalRead(_pin); // current button signal.
For implementing wait transitions a local and short living now variable with the current time and a global or instance variable startTime with the time of the start of a state are reasonable. now is initialized by using:
unsigned long now = millis(); // current (relative) time in msecs.
The startTime variable has to be set within all the actions of the transitions that start a state with a timing condition.
Also the time when a state was started is
The code for a state with a timing condition then looks like this:
} if (state == 2) { // wait for end of a dot.
if (now > startTime + 1 * unitTicks) {
// stop sending the signal
digitalWrite(_pin, LOW);
// advance to the state "9"
state = 9;
startTime = now; // The current time has to be assigned to startTime, because state "9" uses it !
} // if
Global or instance variables are needed when information has to be persisted between the one check and a following. The information that always needs to be persisted is the current state. You can use global variables if there is only one machine of a kind, but be carefull not to use the same variables in multiple machines. Using instance variables like in libraries is a better solution and gives you the flexibility to use the same machine multiple times running concurrently.
In the morse sample you can see how to put everything into a library. The Arduino Library Tutorial that implements a morse functionality too explains how to design a class with member variables that can be used to store the state information.
The requirement for FSM implementations is that it is possible to run multiple of them at the same time independently. So the design of the main FSM function only implements those transitions that are not triggered by an external event.
The most important feature of this function is that there are no loops inside ! The good about this kind opf implementation is that this function doesn't use a lot of CPU cycles in the case no action is needed so it is no harm to call it often.
If the machine has to act on it's own independent from external events the main FSM function has to be called from time to time for example evers time the main program goes idle.
A typical event function in the sample is the sendCode(msg) function:
void sendCode(char *msg)
{
if (_state == 0) {
_nextCode = msg;
_state = 1;
}
}
Here you can see that the same pattern is reused.
Another approach to implement events is to store the information from the event into another global variable and check it within the main FSM function.
If you like to run multiple machines at the same time you have to call all the existing main functions from time to time and call the event functions if needed.
If you like to implement machines on an abstract level the actions that need to be called cannot be hardcoded like in the morse sample. For this case it is possible to have instance variables in your class that can hold function pointers. All you need is to put a function reference into these variables and call the attached function on the corresponding transition. The OneButton Library shows how to do this by providing attach functions.
Imprint License This content is part of the http://www.mathertel.de/ web site.